P2 — a body-relative, self-localized world model
What it shows
The world model built in relation to the body geometry and from the agent's own proprioception — no god's-eye pose anywhere. This is the honest substrate the balance-beam sweep needs.
Setup
The agent is built from an explicit body schema (MouseSchema): the single
source of truth for every zone's body-frame location, used both to build the
MuJoCo body and as the agent's self-knowledge.
- Locomotion from two located drive zones (
drive_L,drive_R), each an opponent pair (signed net activation).DifferentialDriveturns (forward, turn) into their activations and computes the net force and torque from their positions — forward = both, turn = differential, and in-place rotation is possible because the zones are antagonistic. - Self-localization (
DeadReckoner): the agent integrates the body-frame linear velocity (velocimeter) and yaw rate (gyro) it senses into a pose estimate. It never reads its absolute pose. - Each whisker hit is placed from the estimated pose ⊕ the whisker's known body-frame position/angle ⊕ the measured distance.
Assumptions specific to P2
(in addition to the common assumptions) - Locomotion is a computed wrench from the located zones (no simulated limbs). - Proprioception is idealized (true velocity); add noise to study drift. - The map is a monotonic accumulator (no decay).
Run
cd experiments && ../.venv/bin/python p2_world_model.py
Outputs
figures/p2_world_model.png— true vs self-estimated path, the self-localized map, and coverage / precision / dead-reckoning drift.data/p2_world_model.npz— hit cloud + trajectories (gitignored; see Assumptions §data).
Result & interpretation
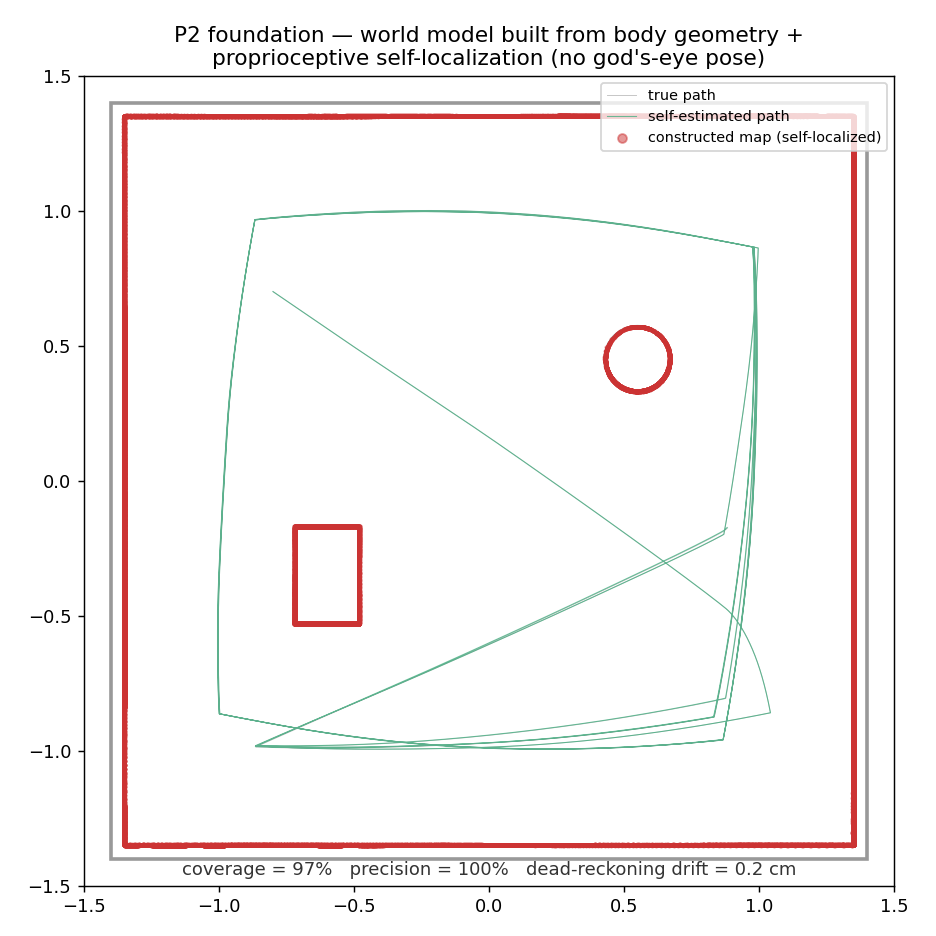
True vs self-estimated trajectory, the world model built from the agent's proprioceptive self-localization (no god's-eye pose), and the coverage / precision / dead-reckoning drift summary.
~97% coverage, ~100% precision, ~0.2 cm drift — the self-estimated path overlies the true path and the map is faithful, built entirely from the agent's body geometry + self-motion sense. With clean proprioception the result approaches P1; the value is that it is now the agent's own construction.